|

Рефератыполиграфия и этнографии москвоведению и спорту языку |
Дипломная работа: Анализ режимов работы электрических сетей ОАО "ММК им. Ильича" и разработка адаптивной системы управления режимами электропотребления
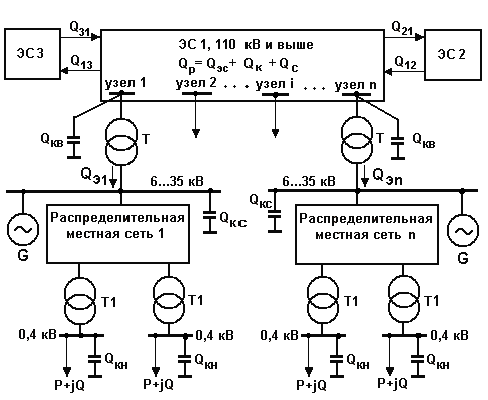
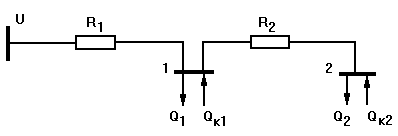
Рисунок 2.2 – Схема размещения КУ в электрической сети Второй уровень – это множество n разомкнутых местных распределительных сетей напряжением 35 кВ и ниже, присоединенных к n узлам электрической сети верхнего уровня через трансформаторы Т. Эти местные распределительные сети непосредственно не связаны между собой, но влияют друг на друга через сеть верхнего уровня. Синхронные генераторы, компенсаторы и двигатели в каждой такой распределительной сети представлены одной эквивалентной синхронной машиной G. От местных электрических сетей через распределительные трансформаторы Т1 питаются низковольтные потребители P+jQ. Компенсирующие устройства могут устанавливаться на шинах высшего (jQкв) и низшего (jQкс) напряжения трансформаторов Т, а также на шинах 0,4 кВ распределительных трансформаторов Т1 и в самой сети 0,4 кВ (jQкн). Значение мощностей этих КУ и подлежит определению. В общем виде задача оптимизации размещения КУ формулируется следующим образом: определить реактивные мощности имеющихся в узлах 6…35 кВ синхронных машин G, мощности КУ в сетях всех напряжений Qкв, Qкс, Qкн, а также значения реактивных мощностей Qэi (i=1, 2, …n), передаваемых в сети потребителей, при которых обеспечивается минимум суммарных затрат. Расчеты компенсации реактивной мощности для сетей всех видов выполняются как при проектировании развития электрических сетей, так и в условиях их эксплуатации. При проектировании определяются мощности КУ и решается задача их распределения в электрической сети. В условиях эксплуатации определяют оптимальные режимы имеющихся КУ в течение суток. Критериями оптимальности в этом случае служат минимум потерь мощности и энергии и соответствие отклонений напряжений допустимым значениям. При проектировании схемы электроснабжения, как правило, минимизируются денежные затраты на эту схему. Снижение потерь мощности за счет установки КУ уменьшает затраты на схему, по следующим причинам: каждый потерянный кВт мощности необходимо выработать на электростанциях и, следовательно, затратить на это денежные средства; генерация недополученной реактивной мощности на электростанциях обходится гораздо дороже, чем потребление (в 3 раза!). Однако и компенсирующие устройства требуют денежных затрат. В связи с этим возникает задача определения оптимальной мощности компенсирующих устройств, отвечающей минимуму суммарных затрат. Такая задача относится к задаче безусловной оптимизации и может быть решена, например, градиентными методами. Рассмотрим такую задачу для магистральной схемы электроснабжения (рис. 2.3). Необходимо определить мощности компенсирующих устройств QК1 и QК2 в узлах 1 и 2 исходя из условия минимума суммарных затрат на установку этих устройств и покрытие потерь активной мощности в схеме.
Рисунок 2.3 – Схема электроснабжения Исходные данные: напряжение схемы U; сопротивления линий R1 и R2; реактивные нагрузки узлов 1 и 2 Q1 и Q2; удельные затраты на установку компенсирующих устройств zo; удельные затраты на покрытие потерь активной мощности со. Целевая функция, представляющая собой суммарные затраты на установку компенсирующих устройств и покрытие потерь активной мощности в схеме, имеет следующий вид
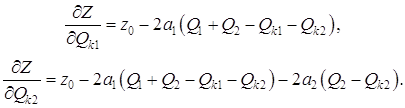
где а1=R1∙co∙10-3/U2=0,0006; а2=R2∙co∙10-3/U2=0,0004. Введение числового коэффициента 10-3 необходимо для приведения всех составляющих целевой функции к одной размерности (у.е.). Для решения задачи выберем метод покоординатного спуска. Определим частные производные целевой функции Z по переменным Q1 и Q2:
Примем исходное приближение:
Для этих значений вычислим значения целевой функции и ее частных производных. Примем, что в направлении переменной Qk2 целевая функция Z убывает сильнее, чем в направлении переменной Qk1, т.е.
В направлении переменной Qk2 и начнем спуск. Примем величину шага Второй шаг: Qk12=0, Qk22=400 квар. Рассчитываем значение целевой функции Z2. Спуск по координате Qk2 следует продолжать до тех пор, пока Zn<Zn-1. Как только Zn становится больше предыдущего значения Zn-1, следует спуск координате Qk2 прекратить и вернуться к значениям переменных Qk1n-1 и Qk2n-1, полученным на n-1 шаге. Выполним новый шаг в направлении другой переменной Qk1. Находится новое значение целевой функции Z. Спуск по этой переменной продолжается так же, как и в направлении Qk2 – до тех пор, пока Zm<Zm-1. Точка с полученными координатами Qk1m-1, Qk2n-1 находится
в окрестности минимума целевой функции Z. При принятой длине шага Это была рассмотрена задача безусловной оптимизации, т.е. нахождения абсолютного минимума. При решении поставленной задачи для нахождения оптимального режима работы сети ОАО "ММК им. Ильича" требуется найти относительный минимум, так как система ограничений будет иметь нелинейный вид (см. далее "Разработка программного обеспечения"). Таким образом, перед нами ставится задача условной оптимизации по реактивной мощности, для которой мы применяем выбранный ранее градиентный метод квадратичного программирования. 3. Разработка программного обеспечения метода оптимизации Для оптимизации режимов по реактивной мощности разработан комплекс программ (см. рис. 3.1). Его условно можно разделить на две части: интерфейсная часть, разработанная в удобном, понятном виде, предназначенная для работы с пользователем любого уровня; расчетная часть, которая непосредственно выполняет необходимые расчеты для получения оптимальных режимов. В интерфейсную часть комплекса входят программы ввода следующих параметров: линий; трансформаторов; компенсирующих устройств; реакторов; нагрузок. В расчетную часть входят следующие программы: формирования узловой матрицы; формирования векторов узловых токов без оптимизации мощностей компенсирующих устройств; расчета узловых напряжений; формирования векторов ограничений узловых токов; расчета оптимальных значений узловых напряжений; расчета оптимальных значений мощностей компенсирующих устройств. Для расчета установившегося неоптимального режима разработаны программы: формирования матриц узловых проводимостей, формирования узловых токов источников, ЛУ разложения матрицы, решение систем уравнений узловых напряжений.
Рисунок 3.1 – Блок-схема разработанного программного обеспечения Для расчета оптимального режима разработана программа условной оптимизации с нелинейными ограничениями. В качестве исходных данных для этой программы используется узловые напряжения, рассчитанные для неоптимального режима. Оптимизация производится градиентным методом квадратичного программирования. Программа расчета неоптимального установившегося режима включает в себя алгоритм треугольного разложения матрицы и итерационный алгоритм решения системы нелинейных уравнений подобный методу Гаусса-Зейделя, модифицированный для решения сетевых нелинейных задач.[2,4,8] Особенностью итерационного алгоритма является то, что на каждой последующей итерации для определения узловых токов источников используется значения узловых напряжений, полученное на предыдущей итерации (см. 3.1).
Для решения задачи нелинейного программирования и определения оптимальных узловых напряжений был разработана программа NCONF CPP, которая реализует последовательный алгоритм квадратичного программирования и конечноразностный градиент. [12] NCONF CPP (m, me, n, xguess, ibtype, xlb, xub, xscale, iprint, maxitn; x, fvalue). Параметры программы NCONF CPP: входные: m, me, n, xguess, ibtype, xscale, iprint, maxitn; входной/выходной: xlb, xub; выходные: x, fvalue. m - общее число ограничений. me – число ограничений равенства. n – число переменных. x – вектор начальных значений напряжений (активных и реактивных составляющих). xguess – вектор размена n, содержащий начальное предположение о значениях напряжений; ibtype – скаляр, задающий вид ограничений на переменные: ibtype=3 – задаем ограничение на напряжение первого узла, все остальные будут иметь те же ограничения. xlb – вектор размера n, содержащий нижние границы переменных: входная, если ibtype=0; выходная, если ibtype=1 или 2; входная/выходная, если ibtype=3. xub - вектор размера n, содержащий верхние границы переменных: входная, если ibtype=0; выходная, если ibtype=1 или 2; входная/выходная, если ibtype=3. xscale – вектор размера n, содержащий диагональную матрицу масштабирования переменных. Все элементы вектора xscale равны 1.0. iprint – параметр, задающий желаемый уровень печати; принимает следующие значения: 0 – нет печати; 1 – выводится итоговый анализ о работе программы; 2 – дополнительно на каждой итерации выводится одна строка с промежуточными результатами; 3 – о каждой итерации выводится детальная информация. maxitn – максимально допустимое число итераций. х – вектор размера n, содержащий вычисленное решение. fvalue – скаляр, содержащий значение целевой функции в полученном решении. Общая задача нелинейного программирования, решаемая данной программой NCONF CPP, состоит в поиске минимума целевой функции
с ограничениями
где все функции задачи являются непрерывно дифференцируемыми. При решении поставленной задачи целевая функция представляет собой потери мощности и имеет вид:
где
Роль нелинейных ограничений выполняет система узловых уравнений с источниками реактивной мощности.
где Y11, …,Y1N – собственные и взаимные проводимости, U1,…,U2 – узловые напряжения. Некоторые уравнения системы (3.5) могут не содержать
составляющую Кроме целевой функции и ограничений любая задача минимизации должна иметь и граничные условия:
т.е. значения напряжений в любом, даже самом удаленном от источника узле не должны выйти за рамки, нормируемые ПУЭ. Метод, используемый данной программой NCONF CPP, основан на последовательном выделении и решении подзадач квадратичного программирования, которые получаются в результате применения квадратичной аппроксимации лангранжиана и линеаризации ограничений[8,12]. Таким образом, на каждой итерации решается подзадача
с ограничениями
где Bk – положительно определенная аппроксимация гессиана; xk – текущая точка. Пусть dk – решение подзадачи. Тогда новая точка xk+1 определяется в результате линейного поиска:
Новая точка такова, что в ней функция качества имеет наименьшее значение. В качестве функции качества употребляется функция Лагранжа. Если оптимум не достигнут, то матрица Bk пересчитывается по положительно определенной формуле секущих. Главная программа NCONF CPP содержит несколько подпрограмм: foryzc – программа формирования матрицы узловых проводимостей; luc – программа используется для разложения матрицы на треугольные сомножители; rluc – программа, которая отвечает за решение системы уравнений. 4. Разработка адаптивной системы управления режимами электропотребления 4.1 Функции автоматизированной системы Сбор, накопление и передача информации, характеризующей режим электропотребления комбината (информация о нагрузках). Сбор, накопление и передача информации, характеризующей состояние электрической сети (информация об обрывах линий и переводах в ремонт оборудования) Передача информации с контрольных точек на диспетчерский пункт и обратно. Обработка полученной информации, расчет режима электропотребления Автоматическое изменение параметров устройств, регулирующих реактивную мощность, в местах, где это возможно. 4.2 Описание работы системы 4.2.1 Ввод системы в работу При первоначальном запуске системы в эксплуатацию собирается информация о конфигурации электрической сети. Собираются следующие параметры: схема сети; информация о линиях: длина, марка проводов или кабеля, которыми выполнено питание между подстанциями. После предварительного расчета, для упрощения работы программного обеспечения в базу данных диспетчерского пункта заносятся следующие параметры: узловая топологическая матрица согласно схеме замещения электрической сети; матрица узловых проводимостей схемы; зарядные мощности линий. Эти данные хранятся в сервере диспетчерской и используются в качестве исходных данных для последующего расчета режима работы сети. Изменяться эти данные могут в случае изменения конфигурации сети при плановых или аварийных выводах оборудования из работы. 4.2.2 Работа системы в нормальном режиме На первом этапе в условиях нормальной работы в определенный момент времени (например, раз в неделю) происходит сбор информации, характеризующей режим электропотребления. Собираются следующие параметры: нагрузки подстанций; мощности питающих систем (в данном случае, подстанций "Ильич", "Заря" и "Азовская"). На большинстве подстанций установлено оборудование, которое может быть использовано для учета электроэнергии, например, микропроцессорная релейная защита. Вторым этапом работы автоматизированной системы является передача по линиям связи собранной информации с подстанций на диспетчерский пункт. Третьим этапом является расчет текущего режима работы электрической сети, нахождение оптимального режима работы электрической сети, описанный в предыдущих главах пояснительной записки. Получаем результаты расчета, необходимые для автоматического внедрения оптимального режима работы сети на практике: мощности компенсирующих устройств. Следующим этапом является передача результатов расчета по линиям связи обратно на подстанцию. Заключительным этапом можно считать регулирование компенсирующих устройств в соответствии с данными расчета. Желательно исключить человеческий фактор, для этого на каждой подстанции помимо современной релейной защиты, отвечающей за сбор информации, желательно установить контроллеры, которые будут автоматически регулировать мощность компенсирующих устройств в местах, где это возможно. Для более точной работы автоматической системы необходимо также предусмотреть обратную связь: после всех регулировок происходит новый сбор информации и перепроверка, что новые установленные параметры соответствуют оптимальному электропотреблению. В случае если что-либо было сделано неправильно, вносится коррекция в исходные данные, и весь алгоритм работы автоматической системы повторяется заново. 4.2.3 Работа системы в случае изменения конфигурации сети В случае изменения конфигурации сети: обрыв линий, вывод в ремонт трансформаторов какой-либо подстанции, поломка какого-либо электрооборудования, которое влияет на процесс энергопотребления, - сбор информации происходит вне рабочего графика, т.е. непосредственно после изменения. В этом случае собираемые данные: схема сети; информация о линиях: длина, марка проводов или кабеля, которыми выполнено питание между подстанциями; нагрузки подстанций; мощности питающих систем (в данном случае, подстанций "Ильич", "Заря" и "Азовская"). Вторым предварительным этапом пересчитывается матрица узловых проводимостей, зарядные мощности линий, формируется новая схема замещения сети. Далее система работает аналогично работе при нормальном режиме. В случае если данные изменения конфигурации сети планируются на длительный или постоянный срок, результаты предварительного расчета считаются новыми исходными данными и заносятся в базу данных сервера диспетчерской. Таблица 4.1 – Сводная таблица собираемой и рассчитываемой информации
4.3 Требования к оборудованию и программному обеспечению Технический уровень автоматизации должен соответствовать передовому уровню, достигнутому в мировой практике ко времени изготовления нестандартного оборудования и поставки серийно производимой техники. При внедрении автоматизированной системы на комбинате должны быть предусмотрены средства эффективного контроля работоспособности оборудования, диагностики датчиков, подсистем всех уровней и системы в целом, как в автоматическом режиме, так и по инициативе обслуживающего персонала. Вывод параметров должен производиться автоматически на дисплеи и, по требованию, на печать. Все оборудование вычислительных комплексов, устанавливаемое на участках производства, должно быть промышленного исполнения и отвечать требованиям условий работы на металлургическом производстве. Оборудование должно работать надежно, ритмично и безаварийно в течение всего годового фонда времени работы стана. Оно должно быть рассчитано на проведение профилактики без нарушения функционирования автоматизированной системы. Работа нового оборудования должна быть согласована с действующим оборудованием других систем автоматизации. Связь между подстанциями и диспетчерским пунктом должна осуществляться с использованием стандартных устройств и протоколов. В качестве инструмента для создания систем сбора, обработки и представления информации в графическом виде должны применяться инструментальные оболочки, соответствующие стандартам МЭК с применением языка, используемого в документообороте комбината. Каких-либо особых требований к оборудованию, устанавливаемому или уже установленному на подстанциях, не имеется, так как данная система универсальна в отношении источников входных данных. Единственным требованием, предъявляемым к приборам учета электроэнергии, является получение данных в аналоговой или дискретной форме. Таким образом, сбор информации для адаптивной системы может происходить любым из перечисленных далее способов: с помощью специально предусмотренного оборудования фирмы Allen-Bradley Power Monitor посредством программного обеспечения RSEnergy; с помощью современных микропроцессорных релейных защит, способных не только защищать силовые цепи, но и измерять необходимые параметры; с помощью контроллера автоматически регулируемых конденсаторных батарей (см. выбор оборудования); с помощью специально устанавливаемых измерительных контроллеров. 4.4 Выбор оборудование для адаптивной системы 4.4.1 Учет электроэнергии Как уже говорилось ранее, адаптивная система универсальна в отношении способа учета электроэнергии. Если на подстанции имеется уже установленная, например, микропроцессорная защита, то установки никакого дополнительного оборудования не требуется. Если же на подстанции нет ничего, что может производить сбор информации в дискретном либо аналоговом виде, то мной предлагается установка оборудования фирмы Allen-Bradley семейства PowerMonitor и программного обеспечения RSEnergy. 4.4.1.1Устройство мониторинга PowerMonitor PowerMonitor – автономное высокотехнологическое устройство управления и мониторинга электроснабжения со встроенными функциями мониторинга, анализа, архивирования и управления[14]. Функции данного устройства: а) функция отображения: напряжения по фазам; токи по фазам; коэффициент мощности cos коэффициент искажений; активная, реактивная, полная мощность; активная, реактивная энергия; частота; пиковое значение всех перечисленных параметров; активная, реактивная энергия: потребленная и сгенерированная; коэффициент несимметрии; последовательность чередования фаз; б) функция архивирования: регистрация событий во времени; регистрация минимальных, максимальных значений; более подробная регистрация отдельных событий; счетчик активной и реактивной энергии: потребляемой и генерируемой; в) функция анализа: спектральный анализ и осциллографирование; коэффициент линейных искажений тока и напряжения; г) функция управления: два управляемых однополюсных резервированных контакта, конфигурируемых пользователем; четыре конфигурируемых дискретных входа; коммутационный интерфейс. Программное обеспечение RSEnergy для контроля электропотребления Самым оптимальным соотношением цены и качества является установка на каждую подстанцию программного обеспечения фирмы Rockwell Automation RSEnergy [14]. С помощью RSEnergy можно получить все необходимые данные по энергопотреблению на предприятии из любого места сети, в данном случае из диспетчерского пункта. Можно контролировать все энергопотребление по объединенной в сеть корпорации и управлять им (см. рис. 4.1). Для каждого измеряемого параметра предоставляются как данные реального времени, так и накопленные данные. Имея прямой доступ к оборудованию Allen-Bradley по контролю за электропитанием и PLC посредством RSLinx, можно: измерять пиковую нагрузку; рассчитывать затраты на электроэнергию; определять режим нагрузок; измерять качество энергии; суммировать нагрузку по нескольким зданиям предприятия или по всей стране. Достоинства RSEnergy: получение оперативной информации; оперативный контроль в режиме реального времени; разносторонний анализ полученных данных; регистрирование событий. 4.4.2 Процессор для диспетчерского пункта Модуль PLC представляет собой модуль процессоров, которые обеспечивают проверенный подход для промышленного управления. Процессоры PLC доступны в разном функциональном исполнении и могут соединяться в различные сети при распределенных процессах и для обеспечения удаленного расположения ввода-вывода. Модульность ввода-вывода и коммуникационных интерфейсов обеспечивает перестраиваемую и расширяемую систему. Изначально конфигурируется система на число входов/выходов и сетевых связей, которое необходимо. Если в последствии возникнет необходимость в расширении системы, можно добавить модули ввода-вывода или коммуникационные интерфейсы. Процессоры PLC-5 доступны в диапазоне форсируемых входов-выходов от максимум 512 до максимум 3072 и в диапазоне памяти пользователя от максимум 6K до максимум 100K слов. Все процессоры – способны управлять удаленно расположенными модулями ввода-вывода. Максимальное число удаленных от процессора модулей ввода-вывода колеблется от 5 до 125. Процессор может контролировать/управлять этими модулями ввода-вывода через сети ControlNet, DeviceNet и Remote I/O. 4.4.3 Сервер связи RSIinx для Rockwell Automation Networks и Devices представляет собой всеобъемлющее решение вопросов организации связи на предприятии при использовании операционных систем Microsoft Windows NT, Windows 95™ и Windows 98™ [14]. Разработанное как реальное 32-разрядное приложение, RSIinx использует все преимущества многозадачных возможностей операционных систем Windows. RSIinx может одновременно обслуживать любую комбинацию поддерживаемых приложений посредством одинаковых или разных коммуникационных интерфейсов. RSLinx – это готовый сервер связи, обеспечивающий соединение с устройствами на производстве для различных приложений от Rockwell Software. RSLinx способен поддерживать множество программных приложений, обеспечивая одновременную связь с разнообразными устройствами в различных сетях. С помощью RSLinx можно передавать информацию, имея прямой доступ к PLC как с подстанций (RSEnergy) на диспетчерский пункт так и обратно. RSLinx предоставляет дружественный графический интерфейс для навигации по сети, включая маршрутизацию по корпоративной сети Ethernet с помощью ControlLogix Gateway для обращения к сетям управления и устройствам на производстве (см. рис. 4.2). Для организации и эксплуатации сетей, начиная от поддерживаемых унаследованных сетей Allen-Bradley и до более новых, обладающих большими возможностями ControlLogix Gateways, предоставляется полный набор драйверов связи. Также поддерживается такое коммуникационное оборудование, как PCMCIA, последовательный порт и сетевые платы на базе ПК. RSLinx поставляется в виде нескольких различных пакетов, удовлетворяющих разнообразным требованиям к стоимости и функциональным возможностям. RSLinx LiteTM предлагает прямую драйверную связь с программируемыми контроллерами для поддержки многих из программных пакетов, предлагаемых Rockwell Software и Allen-Bradley. RSLinx OEMTM - коммуникационный процессор для многих программных продуктов MMI, а также для продуктов, разработанных третьей стороной для использования RSLinx С API. RSLinxTM – полная версия RSLinx обеспечивает связь DDE со всеми продуктами, которые могут выступать в качестве клиентов DDE (через наилучший формат DDE, воспринимаемый клиентом DDE: Advance DDE, CF_Text, XL_Table или Fast DDE). RSLinx C SDK – инструментарий для разработки программного обеспечения, который позволяет пользователю создавать приложения с возможностью доступа к коммуникационным возможностям RSLinx ОЕМ или полного RSLinx посредством обращений к библиотеке Dynamic Link Library (DLL) языка Си. 4.4.3.1 Основные преимущества Простота адаптации к новым процессорам и сетям, поскольку все 32-разрядные драйверы фирмы Allen-Bradley включены в один пакет. Поддержка для устройств 1784-КТ, 1784-КТХ(D), 1784-PCMK, RS-232 DFI, сети Ethernet фирмы Allen-Bradley, удаленных устройств через WINtelligent LINX Gateway, RSEmulate 500 и RSEmulate 5. Совместимость с продуктами программирования фирм Rockwell Software и Allen-Bradley. Доступ для чтения и записи данных в PLC-5, PLC-2, PLC-3, PLC-5/250TM, MicroLogix 1000 и SLC 500. Одновременная работа множества устройств связи. Интуитивный пользовательский интерфейс, протестированный в лаборатории по обеспечению удобства в использовании. Эффективное использование ресурсов системы и минимальный трафик в сети за счет оптимизированных DDE-считываний. Повышенная скорость и уменьшенная загруженность сети с поблочным считыванием и записью. Возможность подключения к старым сетям, поддерживаемая удаленной маршрутизацией через 1785-КА, 1785-КА5, 5130-КА и 5820-EI. Интуитивное обследование системы, поддерживаемое графической функцией SuperWho и комплексной диагностикой. Помощь, которую можно получить из контекстно-зависимой системы подсказок, просто щелкнув мышью. 4.4.3.2 Минимальные требования RSLinx IBM-совместимый компьютер 468SX или выше. Требования к RAM будут меняться в зависимости от применения (12 Мбайт минимум). 8 Мбайт свободного пространства на жестком диске. Графический адаптер и монитор с разрешением VGA или выше. Версия Microsoft Windows NTTM 3.51 или более поздняя (IntelTM 486 или PentiumTM). Любое координатно-указательное устройство, совместимое с Windows NTTM 3.51 (мышь, шаровой манипулятор, сенсорный экран и т.п.) Карта Ethernet и/или устройство связи фирмы Allen-Bradley, или кабель, в зависимости от применения. 4.4.3.3 Различия между разными версиями программного обеспечения RSLinx Для удовлетворения различных стоимостных и функциональных требований множества различных приложений имеется пять версий программного обеспечения RSLinx. В зависимости от того, с какой версией вы работаете, некоторые функциональные возможности могут быть доступны, а могут быть и недоступны. В разделах, следующих ниже, описываются основные различия между имеющимися версиями. 4.4.3.4 Версия программного обеспечения RSLinx Lite RSLinx Lite предоставляет минимум функциональных возможностей, необходимых для поддержки отдельных приложений фирм Rockwell Software и Allen-Bradley. Эта версия не является самостоятельным коммерческим продуктом, а представляет собой составляющей частью программных продуктов, для которых требуется только прямой доступ к сетевым драйверам RSLinx. Эта версия не поддерживает динамический обмен данными (DDE) или выпущенный в обращение интерфейс программирования приложений RSLinx (RSLinx Application Programming Interface (API)). Она не поддерживает возможности связи для многих программных продуктов фирмы Rockwell Software, предназначенных для программирования программируемых контроллеров и отдельных средств автоматизации фирмы Allen-Bradley. RSLinx Lite обладает следующими функциональными возможностями и преимуществами: возможна простая модификация под новые процессоры и сети, поскольку все 32-разрядные драйверы Allen-Bradley включены в один пакет; совместимость с продуктами Rockwell Software и Allen-Bradley; параллельная работа нескольких коммуникационных устройств; возможность связи с имеющимися старыми сетями, обеспечиваемая удаленной маршрутизацией через шесть различных шлюзовых устройств; интуитивно-понятная система отслеживания, обеспечиваемая древовидной графической функцией управления RSWho и исчерпывающей диагностикой; интуитивно-понятный пользовательский интерфейс, протестированный в лаборатории по изучению вопросов использования программного обеспечения фирмы Rockwell Software; получение подсказки по одному щелчку клавишей мыши, при помощи контекстно-зависимой справочной системы. 4.4.3.5 Версия программного обеспечения RSLinx OEM RSIinx OEM включает в себя функциональные средства, требующиеся для обслуживания связи со всеми программными продуктами Rockwell Software, предназначенными для работы с программируемыми контроллерами, включая HMI (человеко-машинный интерфейс). Эта версия включает в себя все функциональные возможности RSLinx Lite, плюс несколько ограниченный AdvanceDDE, предназначенный для работы с программными продуктами Rockwell Software. Она также поддерживает приложения, разработанные для RSLinx Application Programming Interface (API). Коммуникационные возможности RSLinx позволяют осуществлять связь посредством OPC. OPC основан на технологии OLE фирмы Microsoft и предоставляет стандартный для промышленности механизм связи и обмена данными между клиентами и серверами. Дополнительно к функциональным возможностям и преимуществам RSIinx Lite, RSLinx OEM позволяет: обеспечить совместимость с программными продуктами, разработанными другими производителями или пользователем с использованием API или AdvanceDDE, доступных в RSLinx; получить синхронный и асинхронный доступ чтения/записи к процессорным данным в PLC-2®, PLC-3®, PLC-5®, PLC-5/250®, SLC 500™, MicroLogix 1000™, AdvanceDDE и ControlLogix 5550™ через API; повысить скорость и уменьшить загрузку сети за счет поблочного чтения/записи; повысить эффективность использования ресурсов сети и минимизировать трафик за счет оптимизированных считываний DDE; устанавливать «горячую» связь при помощи операции копирования в буфер обмена и извлечения из него для DDE клиентов Rockwell Software; устанавливать OPC связь для локальных клиентов; поддерживать работу приложений, разработанных для RSLinx API; поддерживать AdvanceDDE для программных продуктов Rockwell Software (DDE не поддерживается для DDE клиентов, отличных от Rockwell Software); осуществлять диагностику DDE сервера и регистрацию событий. 4.4.3.6 Версия программного обеспечения RSLinx Professional RSIinx Professional for Rockwell Automation Networks and Devices – это полнофункциональный программный продукт. RSLinx Professional включает в себя все функции предоставляемые RSIinx Lite и RSIinx OEM, плюс динамический обмен данными (DDE) со всеми DDE клиентами, включая Microsoft Excel и Access, плюс обмен в формате AdvanceDDE программных продуктов фирмы Rockwell Software со всеми клиентами, понимающими AdvanceDDE. Дополнительно к функциональным возможностям и преимуществам RSIinx Lite и RSLinx OEM, полнофункциональная версия RSLinx Professional предоставляет следующие возможности: возможность простой модернизации версии RSLinx Lite и/или RSLinx OEM до Linx; синхронного и асинхронного доступа чтения/записи к процессорным данным в PLC-2, PLC-3, PLC-5, PLC-5/250, SLC 500, MicroLogix 1000, AdvanceDDE и Logix 5550 через DDE интерфейс; стандартный DDE обмен на основе CF_Text для стандартных DDE клиентов, таких как Visual Basic® и Lotus 1-2-3™; стандартный DDE обмен на основе Microsoft XL_Table с DDE клиентами Microsoft Office, такими как Microsoft Excel и Access; обмен между FastDDE и DDE клиентами, понимающими FastDDE; OPC связь для локальных клиентов. 4.4.3.7 Версия программного обеспечения RSLinx Gateway RSLinx Gateway for Rockwell Automation Networks and Devices расширяет в рамках предприятия связи на основе RSLinx. Клиенты RSLinx и WINtelligent LINX имеют возможность напрямую соединяться с драйверами RSLinx Gateway по сетям TCP/IP. RSLinx Gateway позволяет клиентам напрямую соединяться в режиме «он-лайн» с процессорами PLC, SLC и MicroLogix фирмы Allen-Bradley, которые подсоединены к сетям, доступным станциям RSLinx Gateway. Это позволяет направлять данные из цехов в приложения для вывода на экран, сохранения или построения трендов. Это позволяет также настраивать отдельные параметры или готовые загружаемые рецепты для поддерживаемых устройств с машины-диспетчера. Дополнительно к функциональным возможностям и преимуществам RSIinx, программный продукт RSLinx Gateway предоставляет следующие возможности: организации в рамках сети предприятия широкого доступа для контроля и регистрации данных, и использования готовых рецептов процессорами; прямого соединения со всеми драйверами на всех станциях RSLinx Gateway вашего предприятия с любого клиента RSLinx или WINtelligent LINX, который имеет TCP/IP связь; совместимости с Microsoft RAS (сервером удаленного доступа), который позволяет использовать телефонную связь с подразделениями; OPC связи с локальными или удаленными клиентами. 4.4.3.8 Версия программного обеспечения RSLinx SDK RSLinx SDK for Rockwell Automation Networks and Devices является инструментом для создания пользовательских приложений, которые могут использовать все коммуникационные возможности программных продуктов RSLinx и RSLinx OEM. RSLinx SDK содержит инструментальные файлы, копию RSLinx OEM и примеры программ, словом все, что может понадобиться для создания приложений, совместимых с продуктами фирм Rockwell Software и Allen-Bradley, также использующих RSLinx. RSLinx SDK обладает следующими функциональными возможностями и преимуществами: обладает мощным набором функций доступа к данным и преобразования данных, а также функциями, созданными под многодрайверную архитектуру линии программных продуктов RSLinx; ускоряет разработку приложений и ограждает ваши приложения от необходимости детального учета особенностей сетевых протоколов и устройств; |
|
 (2.8)
(2.8) (2.9)
(2.9)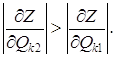 (2.10)
(2.10)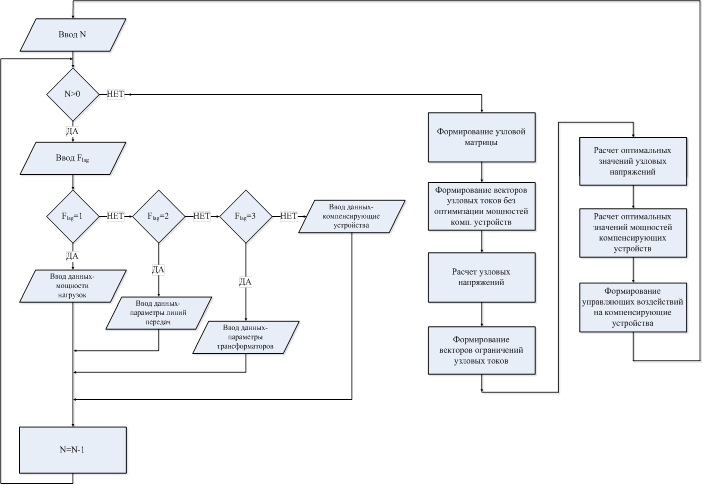
 . (3.1)
. (3.1)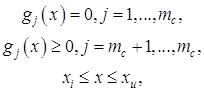 (3.3)
(3.3) , (3.4)
, (3.4)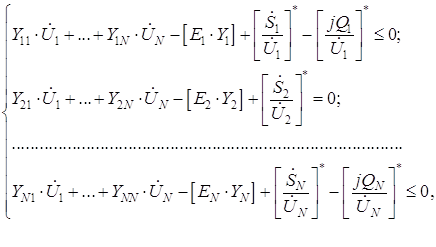 (3.5)
(3.5) в том
случае, если в узлах, для которых составляются данные уравнения, не установлены
компенсирующие устройства. Такое уравнение вместо знака ≤ будет содержать
знак равенства и считаться линейным.
в том
случае, если в узлах, для которых составляются данные уравнения, не установлены
компенсирующие устройства. Такое уравнение вместо знака ≤ будет содержать
знак равенства и считаться линейным. (3.8)
(3.8)